Deep Residual Learning for Image Recognition
Learning residual functions significantly improves quality when training deep neural networks
Overview
- Deep convolutional neural networks have led to major breakthroughs in image classification, in large part due to increasing the depth of the network
- However, there are two issues when simply stacking more layers
- Vanishing gradients
- Degradation
- Vanishing Gradients
- Vanishing gradients refer to when the gradients of earlier layers become very close to zero, leading to updates of the weights also becoming very close to zero
- This leads to:
- Stagnant learning in the earlier layers, which are crucial for learning fundamental features (edges, patterns, etc.)
- Poor feature extraction and learning in the deeper layers since they build upon features learned in the early layers
-
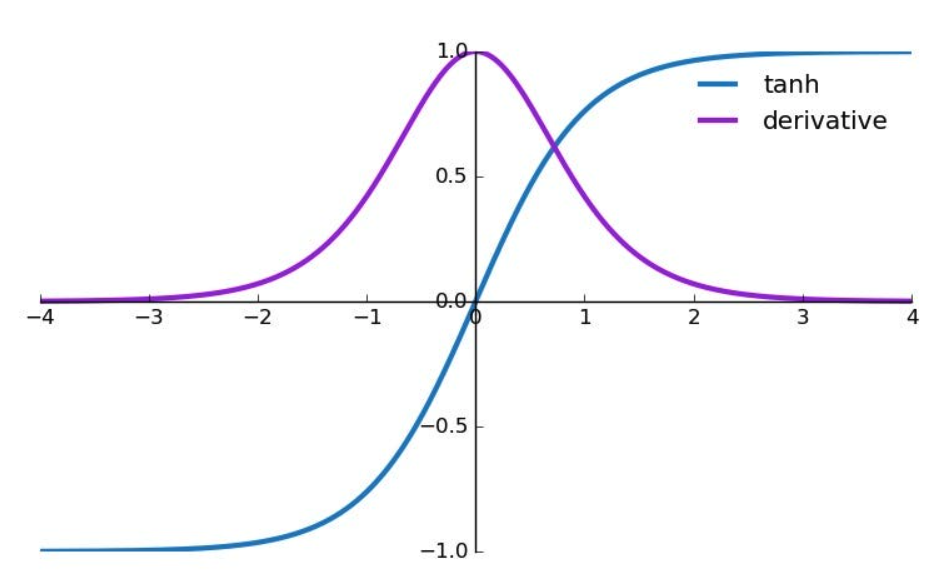
The vanishing gradient problem often arises when using certain activation functions like the sigmoid function or hyperbolic tangent (tanh) function
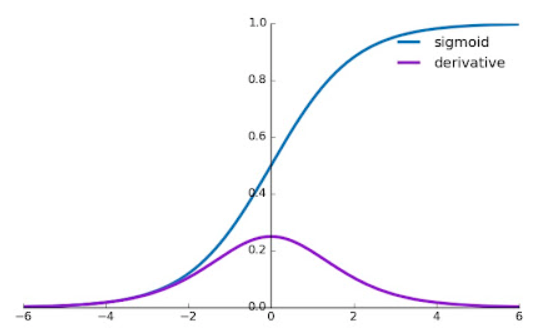
- For large positive or negative inputs to the sigmoid function, the sigmoid function “saturates” near 0 or 1, where the derivative is a very small positive number
- For large positive or negative inputs to the tanh function, the tanh function “saturates” near -1 or 1, where the derivative is a very small positive number.
- During backpropagation, the local gradients are continually multiplied together, shrinking the values towards zero
- Vanishing gradients are largely solved by techniques like:
- Rectified Linear Unit (ReLU) activation function whose derivative is 1 for all positive inputs
- $ReLU(x) = max(0, x)$
- Normalized initialization and intermediate normalization layers
- Residual networks (this paper)
- Rectified Linear Unit (ReLU) activation function whose derivative is 1 for all positive inputs
- Degradation
- As the depth of the network increases, accuracy saturates and then degrades rapidly
- Unexpectedly, this is not caused by overfitting, and adding more layers leads to higher training error
Residual Networks
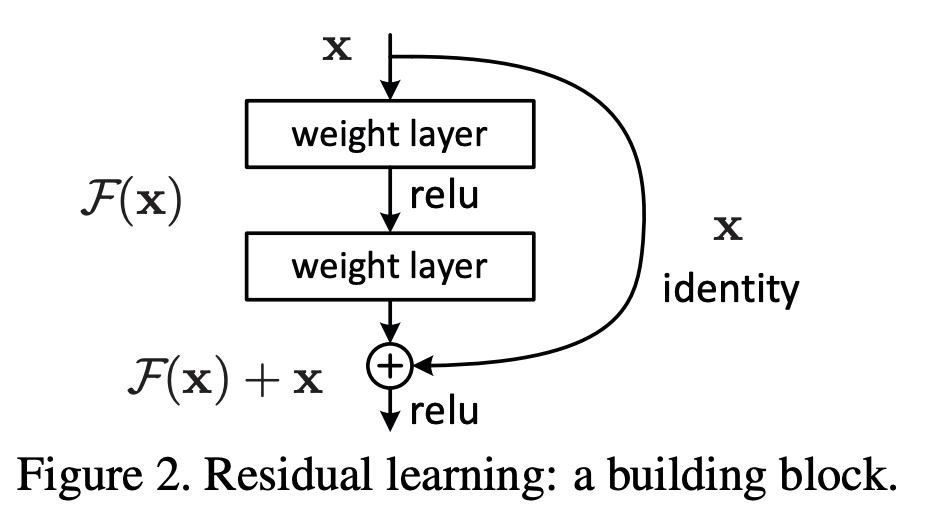
- Instead of hoping a few stacked layers directly fit a desired underlying mapping, we let these layers fit a residual mapping
- Formally, let the underlying desired mapping be $\mathcal{H}(x)$
- Then the stacked nonlinear layers fit a mapping of $\mathcal{F}(x) \coloneqq \mathcal{H}(x) - x$
- The original mapping is now recast into $\mathcal{F}(x) + x$
- The hypothesis is that it is easier to optimize the residual mapping than to optimize the original, unreferenced mapping
- To the extreme, if an identity mapping were optimal, it would be easier to push the residual to zero than to fit an identity mapping by a stack of nonlinear layers
- For the implementation, we use shortcut connections which simply perform an identity mapping, and their outputs are added to the outputs of the stacked layers
- Identity shortcut connections add neither extra parameter nor computation complexity